- Objective: To generate an optimal acceleration profile/velocity profile to avoid the time taken to arrive at a signal, energy expenditure, and idle time at signal
- Vehicle Longitudinal dynamics – Rolling resistance, Air drag
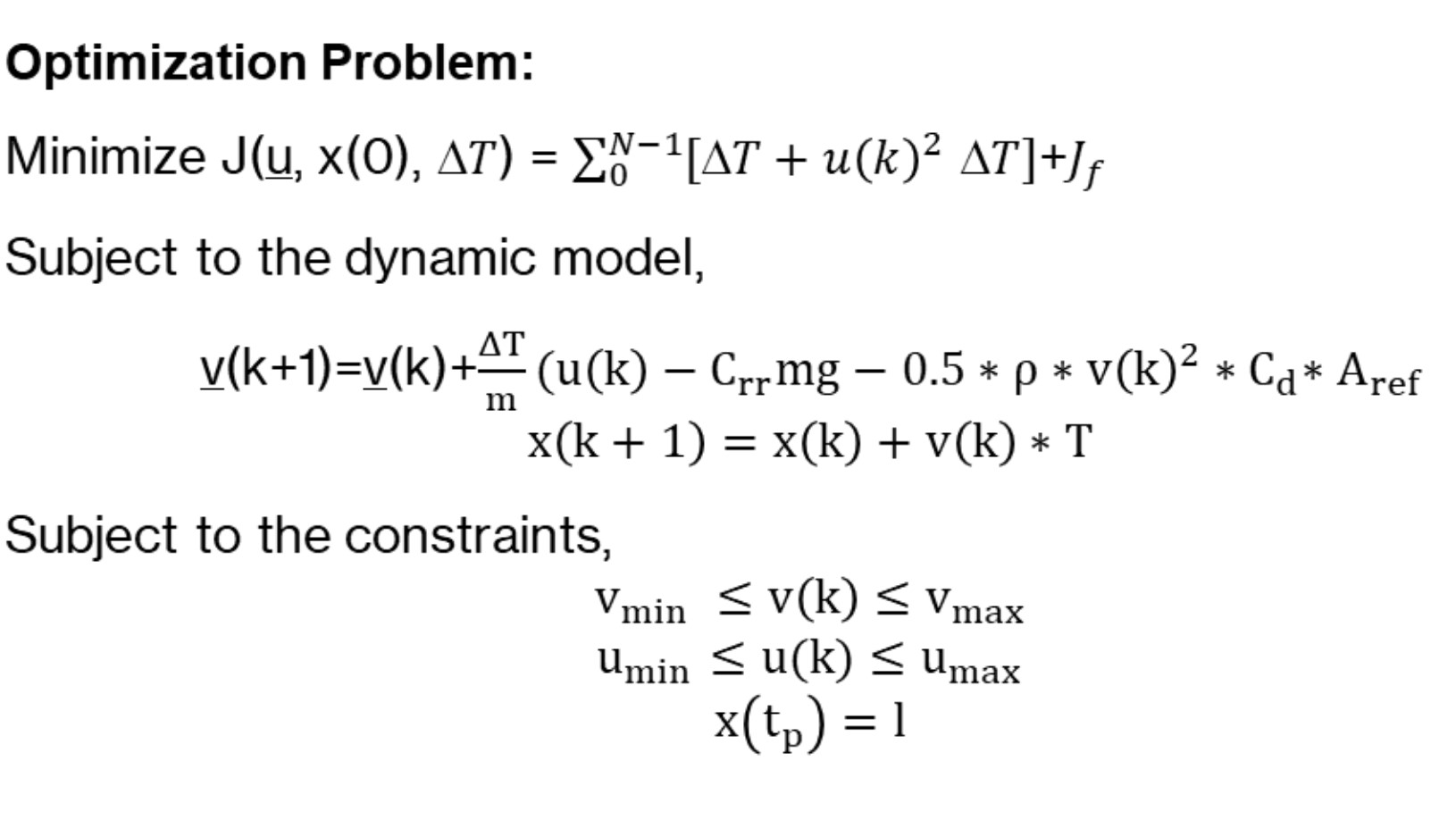
- Objective function – Weighted sum of time and control squared
- State constraints – Speed limits
- Control constraints – Maximum force/acceleration
- Mixed integer problem – Due to traffic signal constraints
- The search space is a set of discrete points
- Non-Convex – No guarantee for an optimal solution
- Approach to tackle this,
- Two-step process
- Solve without signal – if, in green, problem solved
- Else end of the previous green or the start of the next green is the optimal solution according to the monotonicity of the objective function
- Two-step process
- Another problem – Not well-posed due to time being optimized and that showing up in dynamics
- Proper terminal constraints to make sure it’s not zero, negative, or tending to zero
- Discretization
- Forward Euler approximation
- Optimization method: SQP – fmincon
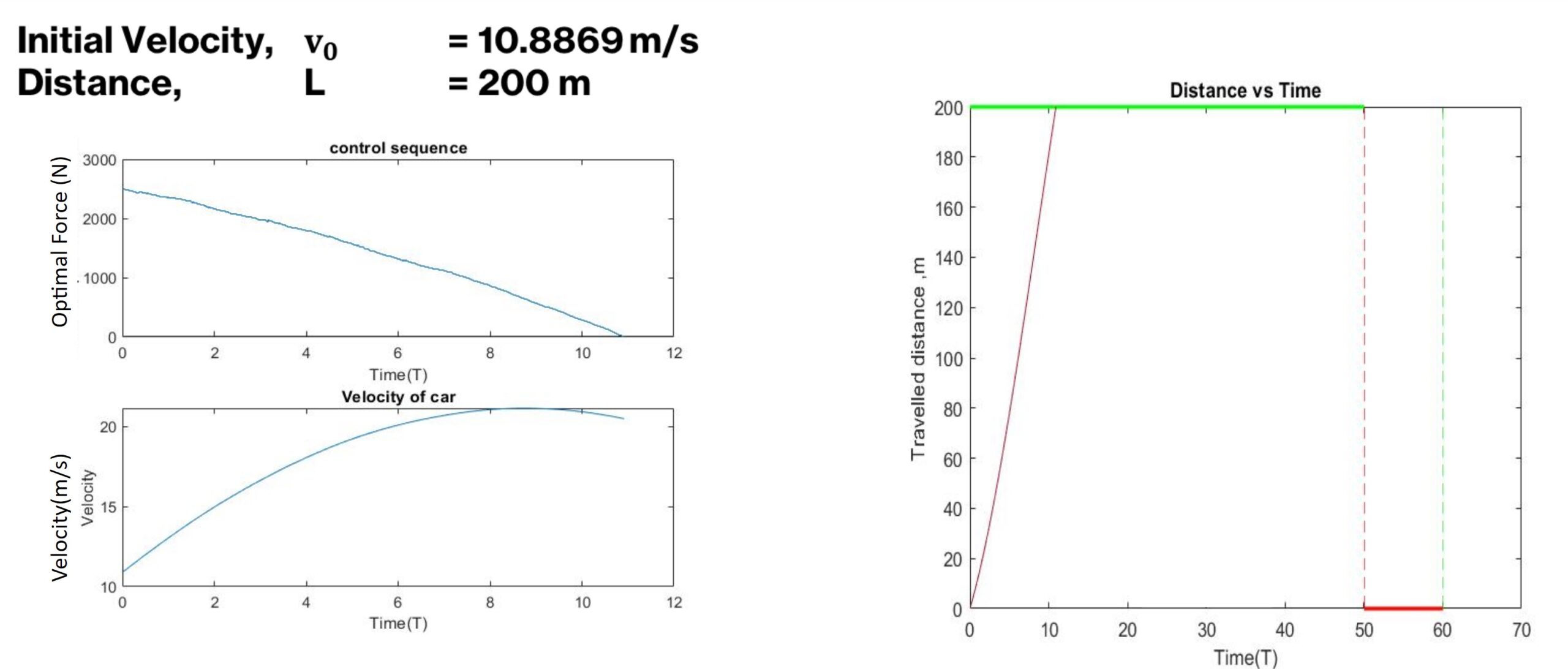
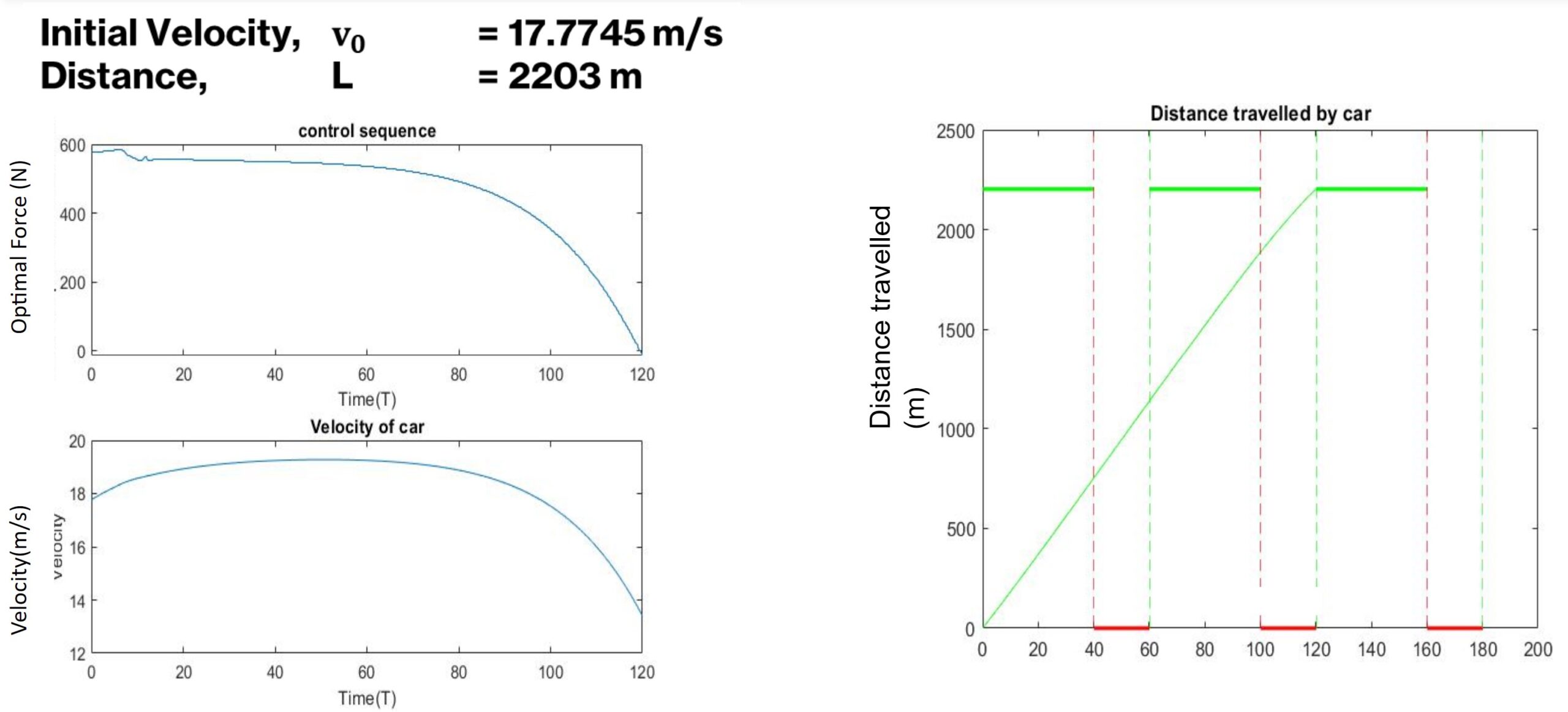
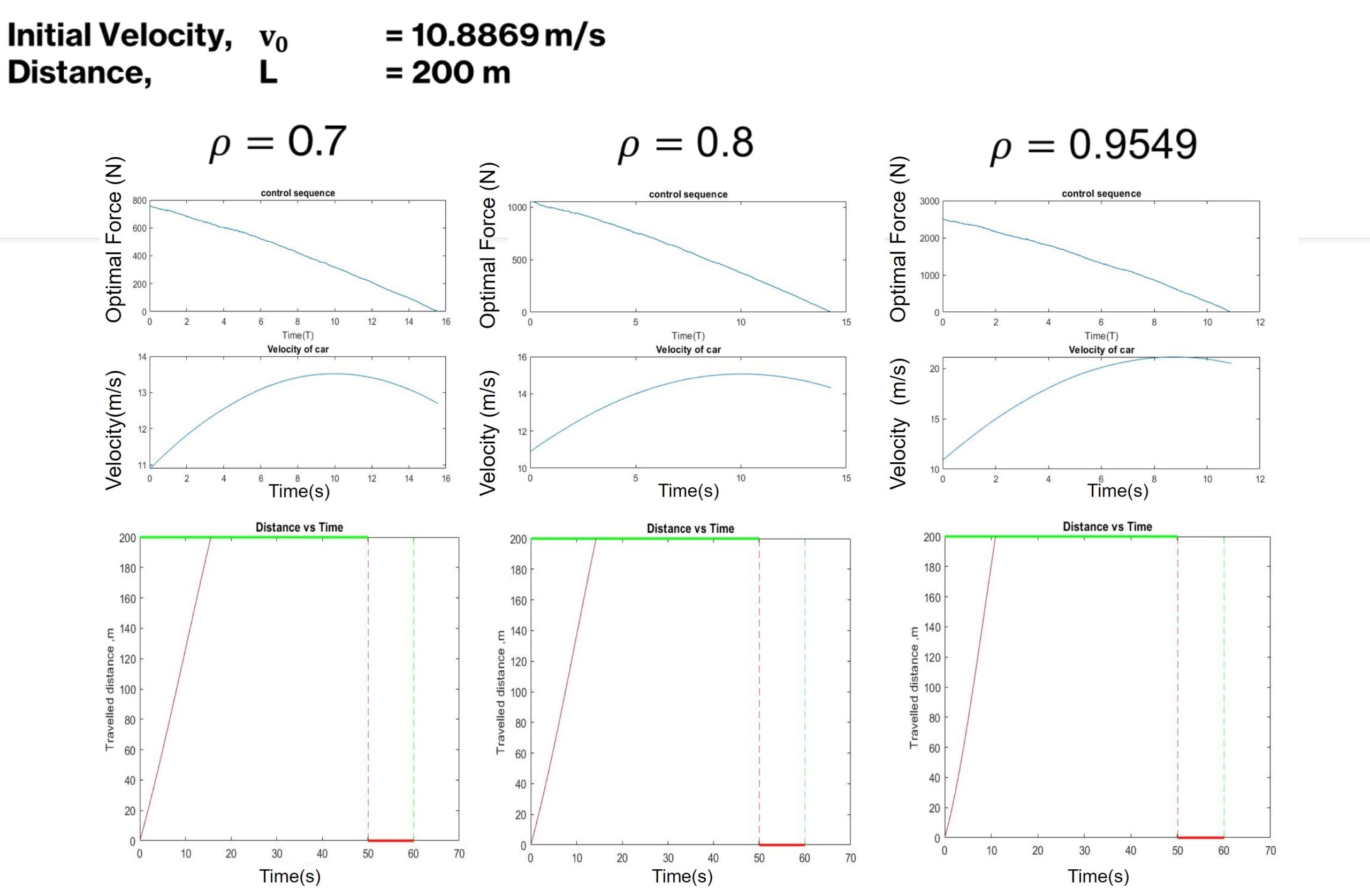
- Results
- Achieved desired performance using appropriate acceleration profiles
- Understood the tradeoff of Time and control effort varying the weights