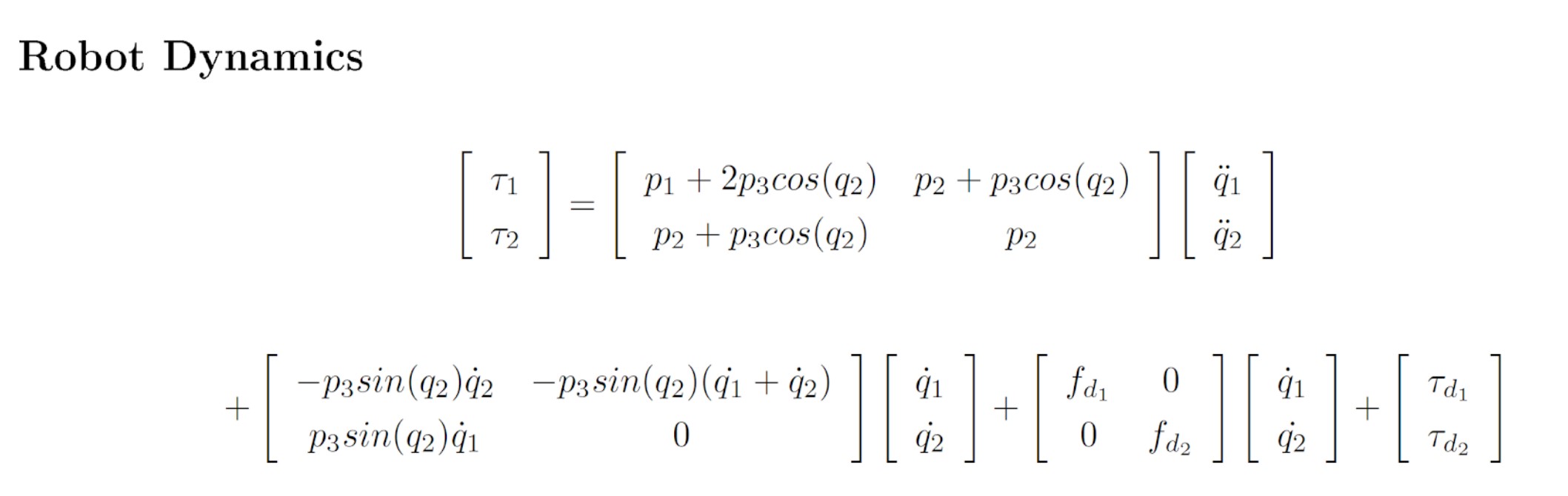
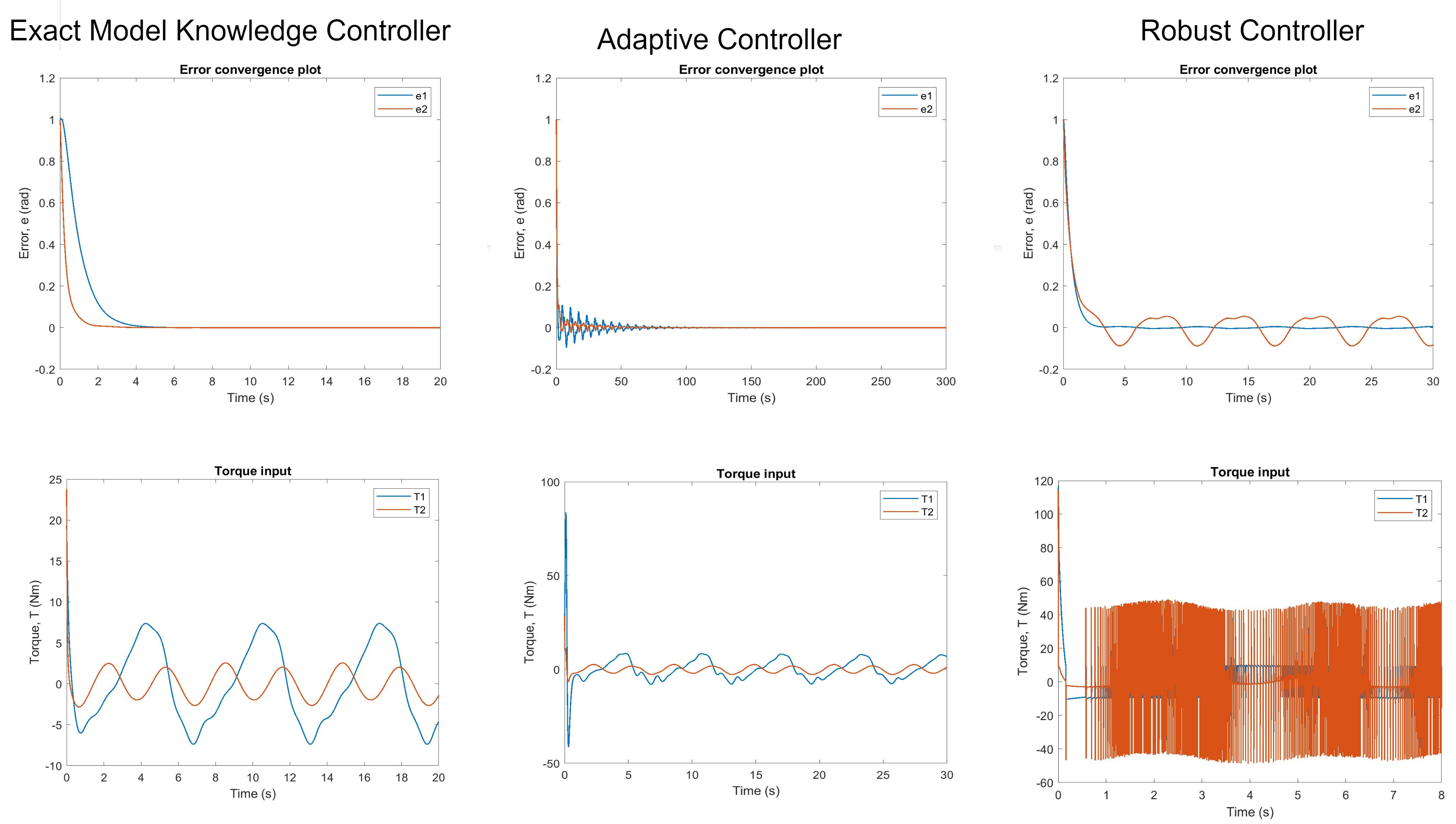
- Designed Exact model knowledge(using feedback linearization), Adaptive and Robust controller for a two-link robot with uncertainties to track a desired trajectory in MATLAB & Simulink
- Performed stability analysis for each controller using the Lyapunov function and verified the simulation results