- Developed a resistive self-sensing PID controller for electro-thermal bimorph soft actuator used in four-fingered gripper
- Simulated the control algorithm using the modeled system dynamics in MATLAB & Simulink
- Deployed the controller on the actual soft actuator in real-time (Rapid Control Prototyping) using LabView
- Improved actuation speed more than 80%, achieved excellent tracking and disturbance rejection
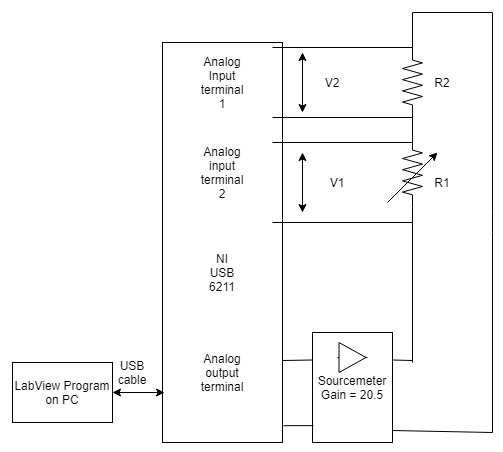
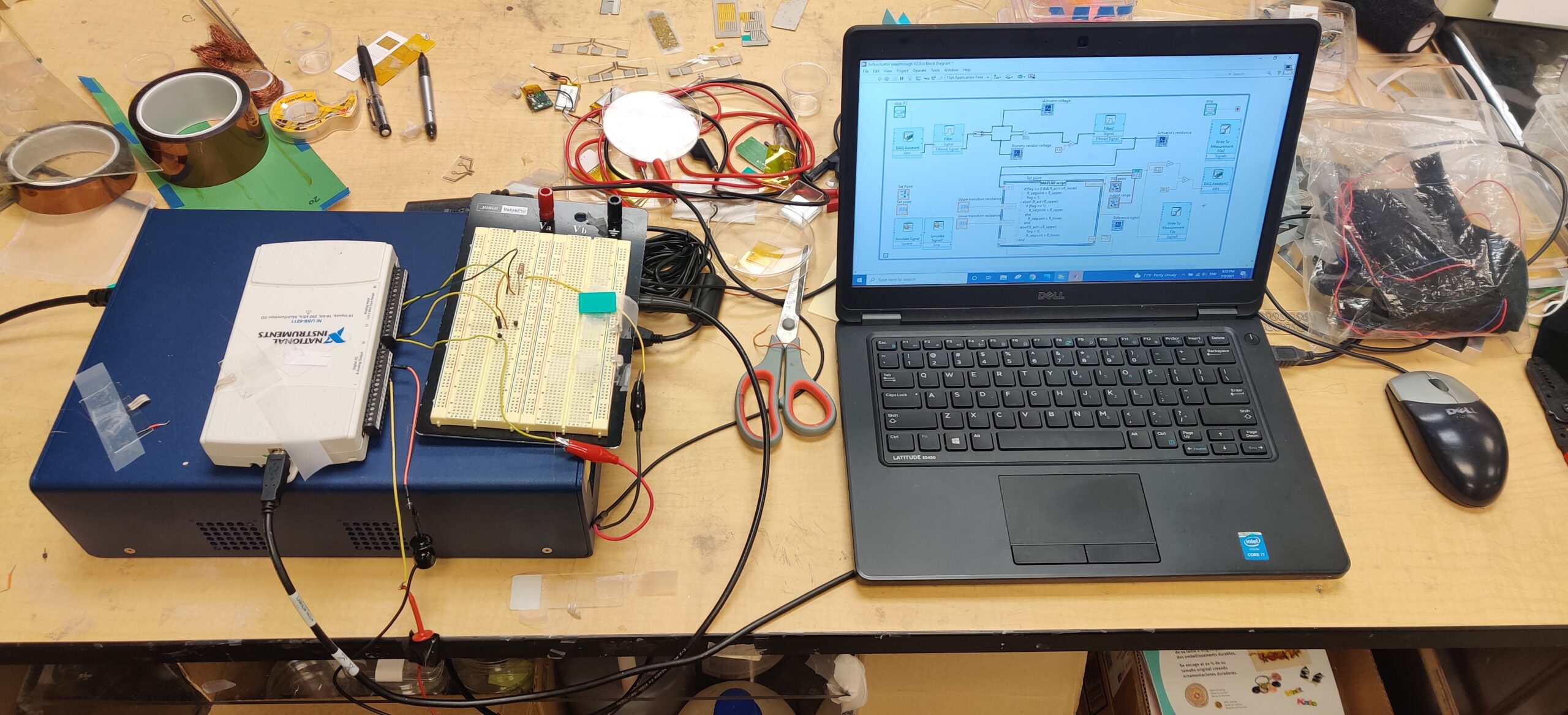
Hardware setup
- Soft actuator – Pure PDMS/PDMS – AgNW composite
- NI USB 6211 – DAQ
- DSM VF – 500 – Amplifier
- A resistor of known resistance – 1.3 ohms
- LabView (Virtual Controller)

Working video:
Other details:
Lab: Nanomechanics and Nanoengineering Laboratory
Project advisor: Dr. Yong Zhu