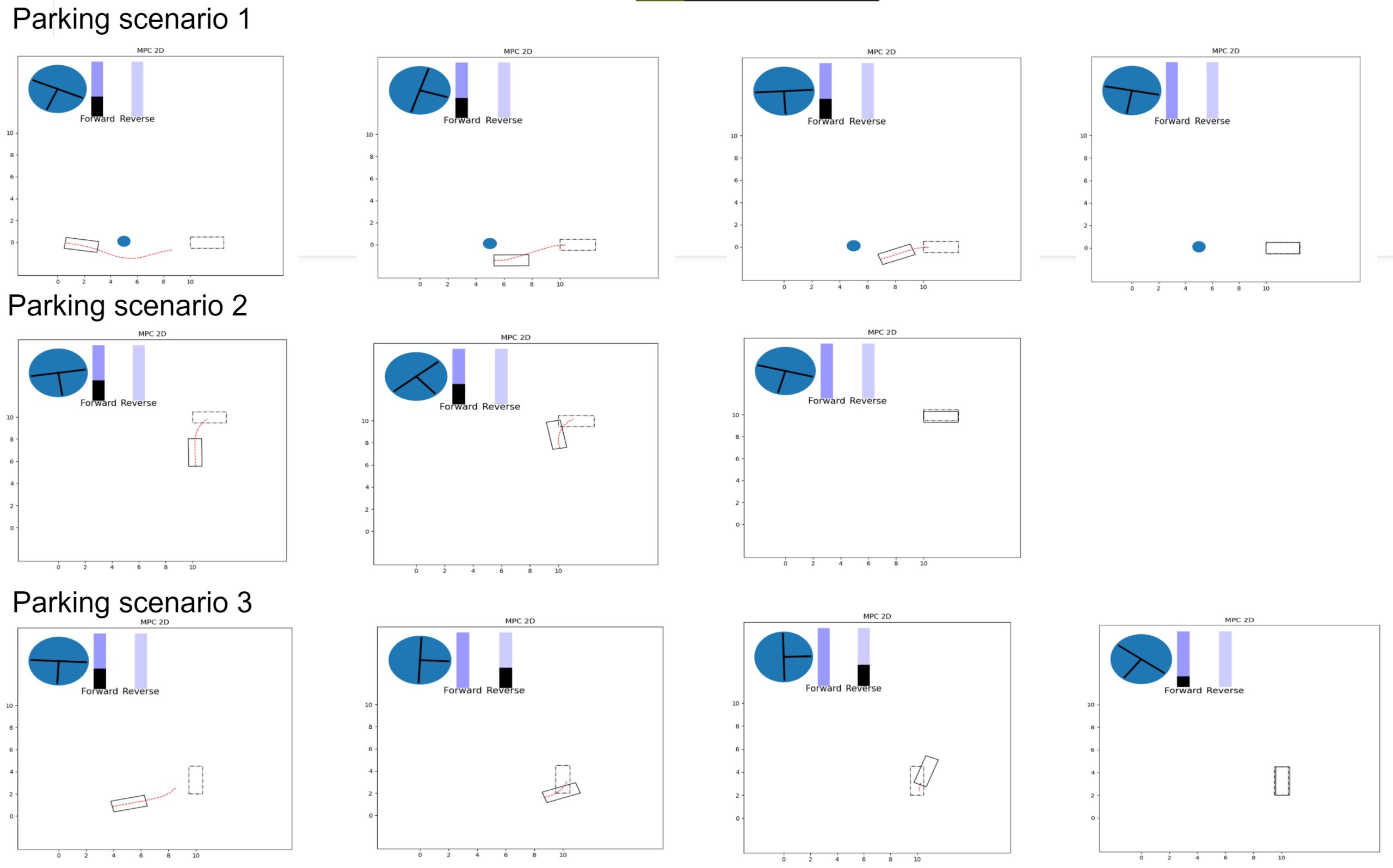
Designed MPC to achieve velocity tracking, obstacle avoidance, and efficient parking maneuver. Implemented in Python
Optimization method
- Sequential Quadratic Programming
Requirements for MPC
- Cost function
- System Dynamics
- Constraints
- Prediction horizon
- Control horizon