Vehicle Dynamics and Controls – Simulation
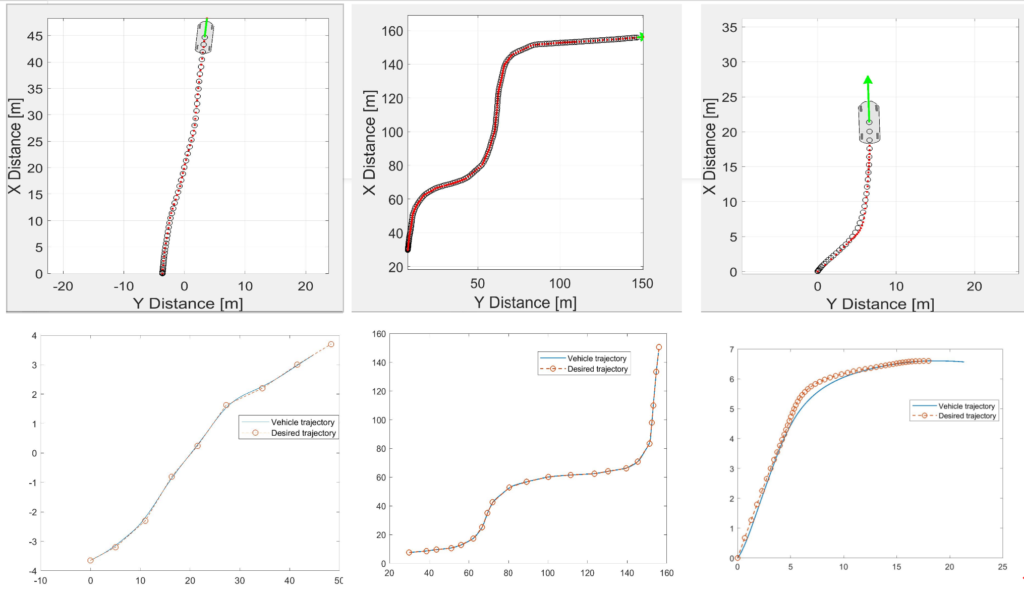
- Developed a longitudinal (PID) and lateral (Pure-pursuit) controller that uses the 3DOF dual-track model in Simulink
- Achieved Dynamic velocity profile modification based on the curvature of the desired trajectory, especially while cornering
- Tested the algorithm for different test scenarios built using Driving Scenario Designer in MATLAB
- Integrated controller with a more sophisticated dynamic model to achieve efficient lateral control even during high-speed cornering and aggressive driving scenarios
- Implemented a robust MPC to achieve efficient lateral control even during high-speed cornering and aggressive driving
For more info about EcoPRT, you can click here https://ecoprt.com/